Równoległościan — definicja, rodzaje i własności (sześcian, prostopadłościan)
Poznaj równoległościan: definicję, rodzaje (sześcian, prostopadłościan, romboedr), własności i wzory na objętość oraz pole — jasne wyjaśnienia i praktyczne przykłady.
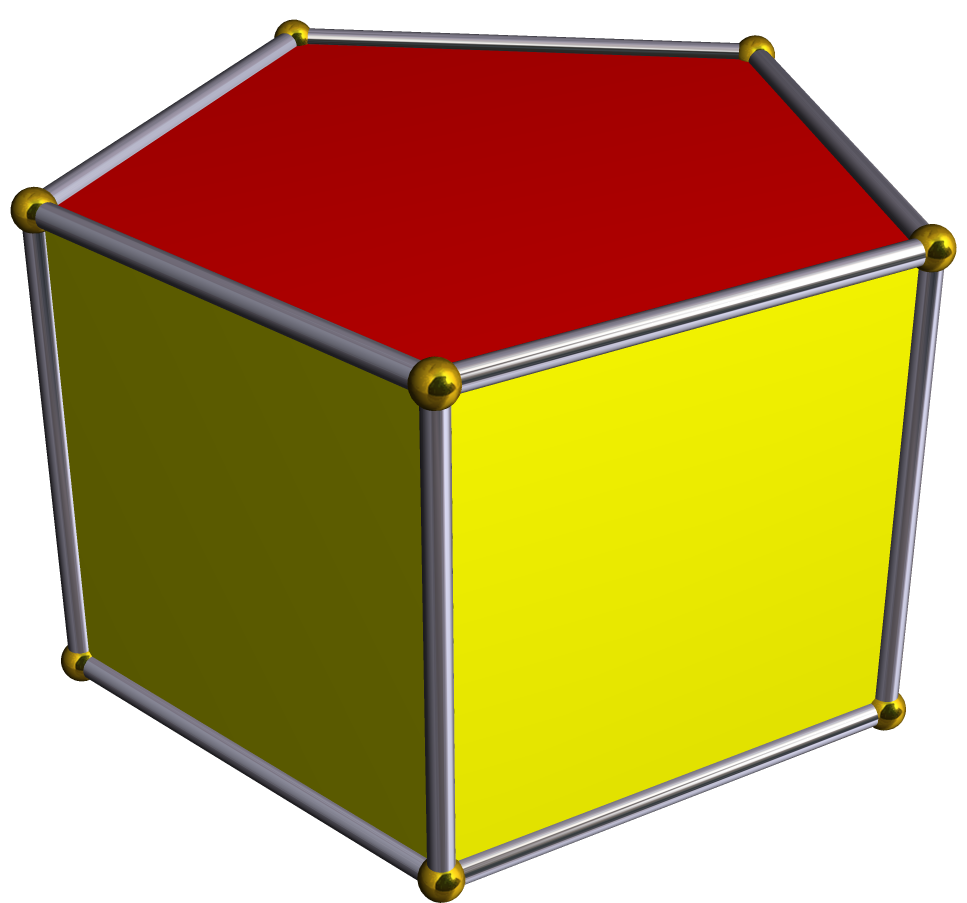
W geometrii równoległościan (parallelepiped) jest trójwymiarową figurą wypukłą utworzoną przez sześć ścian, z których każda jest równoległobokiem. Można go traktować jako trójwymiarny odpowiednik równoległoboku, tak jak sześcian jest odpowiednikiem kwadratu, a prostopadłościan — odpowiednikiem prostokąta. W geometrii afinicznej kąty nie są rozróżniane, dlatego tam pojęcie sprowadza się do obrazów pewnych prostych figur pod przekształceniami afinicznymi; w geometrii euklidesowej dodatkowo rozważamy kąty i odległości.
Galeria obrazów
7 Obrazy




Definicje równoległościanu
- wielościan o sześciu ścianach (heksaedr), z których każda jest równoległobokiem,
- sześciościanu foremnego o trzech parach równoległych ścian, oraz
- graniastosłup, którego podstawa jest równoległobokiem.
Podstawowe własności
- Ma 6 ścian, 12 krawędzi i 8 wierzchołków.
- Ściany są zorganizowane w trzy pary równoległych i przystających ścian; każda para to dwie przeciwległe ściany.
- Przeciwległe krawędzie są równoległe i tej samej długości; krawędzie dzielą się na trzy rodziny po cztery równoległe krawędzie w każdej.
- Przecięcia przekątnych przestrzennych (diagonałów bryły) przecinają się w środku równoległościanu — punkt ten jest środkiem symetrii bryły.
- Równoległościan jest obrazem sześcianu przez odwracalną transformację afiniczną lub liniową; stąd wiele własności (np. równoległość krawędzi) wynika z własności sześcianu.
Objętość i pole powierzchni
Niech wektory a, b, c reprezentują trzy krawędzie wychodzące z jednego wierzchołka. Wówczas objętość równoległościanu dana jest przez:
- Wzór wektorowy / macierzowy: V = |det[a, b, c]| = |a · (b × c)|. Jest to wartość bezwzględna wyznacznika macierzy, której kolumnami (lub wierszami) są współrzędne wektorów a, b, c.
- Wzór „podstawa × wysokość”: V = P_podstawy × h, gdzie P_podstawy to pole dowolnej ściany traktowanej jako podstawa, a h — wysokość (odległość) między tą ścianą a ścianą równoległą.
Pole powierzchni całkowitej można wyrazić przez pola trzech par równoległych ścian: S = 2(S1 + S2 + S3), gdzie S1, S2, S3 to pola ścian należących do trzech różnych rodzin (np. pola dwóch sąsiadujących ścian wychodzących z jednego wierzchołka).
Przekątne i symetria
- Przekątne przestrzenne (wektory odpowiadające sumom a±b±c) łączą przeciwległe wierzchołki; ich punkty przecięcia wyznaczają środek symetrii bryły.
- W ogólnym równoległościanie długości czterech przekątnych mogą się różnić; w sześcianie wszystkie są równe.
- Równoległościan ma ośrodek symetrii (jest figurą środkowo-symetryczną). W szczególnych przypadkach występują dodatkowe symetrie (np. prostopadłościan ma osie symetrii wynikające z prostopadłości krawędzi).
Rodzaje i szczególne przypadki
Prostopadłościan — równoległościan o krawędziach parami prostopadłych (wszystkie ściany są prostokątami). Szczególnym przypadkiem prostopadłościanu jest sześcian — wszystkie krawędzie mają tę samą długość, a wszystkie ściany są kwadratami. Gdy wszystkie ściany są rombami, otrzymujemy romboedr (ramboedr — równoległościan o rombowych ścianach).
Przykłady zastosowań i występowanie
- Równoległościany pojawiają się w analizie krystalograficznej jako jednostki komórkowe niektórych sieci krystalicznych.
- W grafice komputerowej i geometrii obliczeniowej równoległościan jest użyteczny jako element bazowy do opisu brył oraz do konstrukcji siatek i podziałów przestrzeni.
- Transformacje afiniczne mapujące sześcian na równoległościan są wykorzystywane przy modelowaniu odkształceń i przy analizie równoważności figur w geometrii afinicznej.
Uwaga metodyczna
W literaturze spotyka się różne terminy i tłumaczenia (np. „parallelepiped”, „hexahedron” itp.). Ważne jest rozróżnienie równoległoboku (figur dwuwymiarowa) i równoległościanu (jego trójwymiarowy odpowiednik). Zrozumienie relacji między tymi pojęciami ułatwia korzystanie z własności geometrycznych w zadaniach praktycznych i teoretycznych.
W razie potrzeby mogę dodać przykładowe obliczenia objętości dla konkretnego równoległościanu (na podstawie wektorów krawędzi) lub rozwinąć wzory na długości przekątnych i pola poszczególnych ścian.
Właściwości
Każda z trzech par równoległych ścian może być postrzegana jako płaszczyzna podstawy graniastosłupa. Graniastosłup równoległoboczny ma trzy zestawy czterech równoległych krawędzi; krawędzie w każdym zestawie są równej długości.
Równoległoboki wynikają z przekształceń liniowych sześcianu (dla przypadków niezdegenerowanych: przekształceń liniowych bijektywnych).
Ponieważ każda ściana ma symetrię punktową, równoległościan jest zonohedronem. Również cały równoległościan ma symetrię punktową Ci (zobacz też triclinic). Każda ściana jest, patrząc z zewnątrz, lustrzanym odbiciem przeciwległej ściany. Ściany są w ogóle chiralne, ale równoległościan nie jest.
Teselacja wypełniająca przestrzeń jest możliwa z przystającymi kopiami dowolnego równoległościanu.
Tom
Objętość równoległoboku jest iloczynem pola podstawy A i wysokości h. Podstawą jest dowolna z sześciu ścian równoległoboku. Wysokość to odległość prostopadła między podstawą a przeciwległą ścianą.
Alternatywna metoda definiuje wektory a = (a1, a2, a3), b = (b1, b2, b3) i c = (c1, c2, c3) jako trzy krawędzie, które spotykają się w jednym wierzchołku. Objętość równoległościanu jest więc równa wartości bezwzględnej skalarnego iloczynu potrójnego a - (b × c):
V = | a ⋅ ( b × c ) | = | b ⋅ ( c × a ) | = | c ⋅ ( a × b ) | {displaystyle V=left|mathbf {a} \cdot (\mathbf {b} \times \mathbf {c} ) \right|=left|mathbf {b} \cdot (\mathbf {c} \times \mathbf {a} )\right|=left|\mathbf {c} \cdot (\mathbf {a} \times \mathbf {b} )\right|} 
Jest to prawdą, ponieważ jeśli wybierzemy b i c jako krawędzie podstawy, to pole podstawy jest z definicji iloczynem krzyżowym (zobacz geometryczne znaczenie iloczynu krzyżowego),
A = | b | c | sin θ = | b × c | , {displaystyle A= lewa strona|mathbf {b} \right|left|mathbf {c} \right|sin \theta = \left|mathbf {b} \times \mathbf {c} \right|,} 
gdzie θ jest kątem między b i c, a wysokość wynosi
h = | a | cos α , {displaystyle h=left|mathbf {a} \prawo|cos \alpha ,} 
gdzie α jest kątem wewnętrznym między a i h.
Z rysunku można wywnioskować, że wielkość α jest ograniczona do 0° ≤ α < 90°. Przeciwnie, wektor b × c może tworzyć z a kąt wewnętrzny β większy niż 90° (0° ≤ β ≤ 180°). Mianowicie, ponieważ b × c jest równoległy do h, wartość β jest albo β = α, albo β = 180° - α. Zatem
cos α = ± cos β = | cos β | , {{displaystyle \cos \alpha = \pm \cos \beta = \left||cos \beta \right|,} 
oraz
h = | a | | cos β | . {displaystyle h= lewa strona|mathbf {a} ™right|lewa strona|cos ™beta ™right|. } 
Stwierdzamy, że
V = A h = | a | b × c | | cos β | , {displaystyle V=Ah= \left|mathbf {a} \right|left|mathbf {b} \times \mathbf {c} \right|left|cos \beta \right|,} 
który z definicji iloczynu skalarnego (lub punktowego) jest równoważny wartości bezwzględnej a - (b × c), Q.E.D.
To ostatnie wyrażenie jest również równoważne wartości bezwzględnej wyznacznika macierzy trójwymiarowej zbudowanej z a, b i c jako wierszy (lub kolumn):
V = | det [ a 1 a 2 a 3 b 1 b 2 b 3 c 1 c 2 c 3 ] | . {\displaystyle V=\left|\det {\begin{bmatrix}a_{1}&a_{2}&a_{3}\\b_{1}&b_{2}&b_{3}\\c_{1}&c_{2}&c_{3}\end{bmatrix}}\right|. } 
Znajduje się to przy użyciu Reguły Cramera na trzech zredukowanych dwuwymiarowych macierzach znalezionych z oryginału.
Jeżeli a, b i c są długościami krawędzi równoległoboku, a α, β i γ są kątami wewnętrznymi między krawędziami, to objętość wynosi
V = a b c 1 + 2 cos ( α ) cos ( β ) cos ( γ ) - cos 2 ( α ) - cos 2 ( β ) - cos 2 ( γ ) . V=abc{sqrt {1+2 cos(alfa )- cos(βeta )- cos(gamma )- cos ^{2}(alfa )- cos ^{2}(β )- cos ^{2}(gamma )- cos ^{2}(β )} } 
Odpowiadający czworościan foremny
Objętość każdego czworościanu foremnego, który ma trzy zbieżne krawędzie równoległościanu, jest równa jednej szóstej objętości tego równoległościanu (zobacz dowód).

Przypadki szczególne
Dla równoległoboków z płaszczyzną symetrii istnieją dwa przypadki:
- ma cztery prostokątne ściany
- ma dwie ściany rombowe, a z pozostałych ścian dwie sąsiednie są równe i dwie pozostałe również (te dwie pary są swoimi lustrzanymi odbiciami).
Patrz również monokliniczny.
Prostopadłościan, zwany także prostokątnym równoległościanem lub czasem po prostu prostopadłościanem, jest równoległościanem, którego wszystkie ściany są prostokątne; sześcian jest prostopadłościanem o kwadratowych ścianach.
Romboedr to równoległościan o wszystkich rombowych ścianach; trapez trójkątny to romboedr o przystających rombowych ścianach.

Idealny równoległobok
Idealny równoległościan to równoległościan z krawędziami o całkowitej długości, przekątnymi ścian i przekątnymi przestrzeni. W 2009 roku wykazano istnienie kilkudziesięciu doskonałych równoległościanów, co było odpowiedzią na otwarte pytanie Richarda Guya. Jeden z przykładów ma krawędzie 271, 106 i 103, mniejsze przekątne 101, 266 i 255, większe przekątne 183, 312 i 323 oraz przekątne przestrzenne 374, 300, 278 i 272.
Znane są pewne idealne równoległoboki o dwóch prostokątnych ścianach. Nie wiadomo jednak, czy istnieją takie, których wszystkie ściany są prostokątne; taki przypadek nazywamy doskonałym prostopadłościanem.
Parallelotope
Coxeter uogólnienie równoległościanu w wyższych wymiarach nazwał równoległościanem.
W szczególności w przestrzeni n-wymiarowej nazywa się ją n-wymiarowym równoległobokiem, lub po prostu n-równoległobokiem. Tak więc równoległobok jest 2-paralelotopem, a równoległobok jest 3-paralelotopem.
Ogólniej, równoległościan, lub równoległościan voronoi, ma równoległe i przystające przeciwległe ściany. Tak więc 2-paralelotop jest równoległobokiem, który może również zawierać pewne sześciokąty, a 3-paralelotop jest równoległościanem, w tym 5 rodzajów wielościanów.
Przekątne n-równoległoboku przecinają się w jednym punkcie i są przez ten punkt symetryczne. Inwersja w tym punkcie pozostawia n-równoległobok niezmienionym. Zobacz też punkty stałe grup izometrycznych w przestrzeni euklidesowej.
Krawędzie promieniujące od jednego wierzchołka k-równoległościanu tworzą k-ramkę ( v 1 , ... , v n ) {displaystyle (v_{1},ldots ,v_{n})} przestrzeni wektorowej, a równoległościan można odzyskać z tych wektorów, biorąc kombinacje liniowe wektorów, z wagami od 0 do 1.
przestrzeni wektorowej, a równoległościan można odzyskać z tych wektorów, biorąc kombinacje liniowe wektorów, z wagami od 0 do 1.
Objętość n-paralotopu osadzonego w R m {{m}}  gdzie m ≥ n {{displaystyle m}}
gdzie m ≥ n {{displaystyle m}}  można obliczyć za pomocą wyznacznika Grama. Alternatywnie, objętość jest normą iloczynu zewnętrznego wektorów:
można obliczyć za pomocą wyznacznika Grama. Alternatywnie, objętość jest normą iloczynu zewnętrznego wektorów:
V = ‖ v 1 ∧ ⋯ ∧ v n ‖ . V = ∧ v 1 ∧ ⋯ ∧ v n ‖ . } 
Jeśli m = n, to jest to wartość bezwzględna wyznacznika n wektorów.
Inny wzór na obliczenie objętości n-równoległoboku P w R n {displaystyle \mathbb {R} ^{n}}  , którego n + 1 wierzchołków to V 0 , V 1 , ... , V n {displaystyle V_{0},V_{1},ldots ,V_{n}}}.
, którego n + 1 wierzchołków to V 0 , V 1 , ... , V n {displaystyle V_{0},V_{1},ldots ,V_{n}}}.  , to
, to
V o l ( P ) = | d e t ( [ V 0 1 ] T , [ V 1 1 ] T , ... , [ V n 1 ] T ) | ,
gdzie [ V i 1 ] {displaystyle [V_{i}}} ![{\displaystyle [V_{i}\ 1]}](https://www.alegsaonline.com/image/d2362bea0baa876bb7e76e2c43bbac55d2241798.svg) jest wektorem rzędów utworzonym przez konkatenację V i {displaystyle V_{i}}
jest wektorem rzędów utworzonym przez konkatenację V i {displaystyle V_{i}} i 1. Wyznacznik jest niezmienny, jeżeli [ V 0 1 ] {displaystyle [V_{0}}} jest odjęty od [ V i 1 ] {displaystyle
i 1. Wyznacznik jest niezmienny, jeżeli [ V 0 1 ] {displaystyle [V_{0}}} jest odjęty od [ V i 1 ] {displaystyle ![{\displaystyle [V_{0}\ 1]}](https://www.alegsaonline.com/image/5fe4ab89b67a521fcf8097b1a2996fdda40fba1e.svg) V_{i}}}} na ostatniej pozycji zmienia tylko znak. (i > 0), a umieszczenie [ V 0 1 ] {{displaystyle [V_{0}}} na ostatniej pozycji zmienia tylko jego znak.
V_{i}}}} na ostatniej pozycji zmienia tylko znak. (i > 0), a umieszczenie [ V 0 1 ] {{displaystyle [V_{0}}} na ostatniej pozycji zmienia tylko jego znak.
Podobnie, objętość dowolnego n-prostokąta, który dzieli n zbieżnych krawędzi równoległościanu, ma objętość równą jednej 1/n! objętości tego równoległościanu.
Leksykografia
Słowo to pojawia się jako parallelipipedon w tłumaczeniu Elementów Euklidesa przez Sir Henry'ego Billingsleya, datowanym na 1570 rok. W wydaniu Cursus mathematicus z 1644 roku Pierre Hérigone użył pisowni parallelepipedum. The Oxford English Dictionary cytuje dzisiejszy parallelepipedum jako po raz pierwszy pojawiający się w Chorea gigantum Waltera Charletona (1663).
Charles Hutton's Dictionary (1795) pokazuje parallelopiped i parallelopipedon, pokazując wpływ formy łączącej parallelo-, jak gdyby drugi element był pipedon, a nie epipedon. Noah Webster (1806) uwzględnia pisownię parallelopiped. Wydanie Oxford English Dictionary z 1989 r. wyraźnie opisuje parallelopiped (i parallelipiped) jako formy niepoprawne, ale w wydaniu z 2004 r. są one wymienione bez komentarza i podana jest tylko wymowa z akcentem na piątą sylabę pi (/paɪ/).
Zmiana z dala od tradycyjnej wymowy ukryła inny podział sugerowany przez greckie korzenie, z epi- ("na") i pedon ("ziemia") łączące się, aby dać epiped, płaski "płaszczyzna". Tak więc twarze równoległościanu są płaskie, a przeciwległe twarze są równoległe.
Pytania i odpowiedzi
P: Co to jest równoleżnik?
O: Równoległobok to trójwymiarowa figura utworzona z sześciu równoległoboków.
P: Jaki inny termin jest czasami używany w odniesieniu do równoległościanu?
O: Termin "romboidalny" jest również czasami używany w tym samym znaczeniu co "równoległościan".
P: W jaki sposób równoległobok odnosi się do równoległoboku?
O: Równoległobok odnosi się do równoległoboku w taki sam sposób, w jaki sześcian odnosi się do kwadratu lub prostopadłościan odnosi się do prostokąta.
P: Czy definicja równoległoboku w geometrii euklidesowej obejmuje wszystkie cztery powiązane pojęcia?
O: Tak, w geometrii euklidesowej definicja równoległościanu obejmuje wszystkie cztery powiązane pojęcia: równoległościan, równoległobok, sześcian i prostopadłościan.
P: Jaki jest kontekst geometrii afinicznej?
O: Kontekst geometrii afinicznej to taki, w którym kąty nie są rozróżniane.
P: W kontekście geometrii afinicznej, jakie kształty są zawarte w definicji równoległoboku?
O: W geometrii afinicznej definicja równoległoboku dopuszcza tylko równoległoboki i równoległoboki.
P: Jakie są trzy równoważne definicje równoległościanu?
O: Trzy równoważne definicje równoległościanu to: wielościan o sześciu ścianach, z których każda jest równoległobokiem; sześciościan o trzech parach ścian równoległych; oraz graniastosłup, którego podstawa jest równoległobokiem.
Powiązane artykuły
Autor
AlegsaOnline.com Równoległościan — definicja, rodzaje i własności (sześcian, prostopadłościan) Leandro Alegsa
URL: https://pl.alegsaonline.com/art/74539