Przerwania w systemach komputerowych: mechanizm obsługi zdarzeń sprzętowych i programowych
Opis mechanizmu przerwań w systemach komputerowych: rodzaje (sprzętowe, programowe, synchroniczne/asynchroniczne), działanie obsługi (ISR, zapis kontekstu), priorytety i maskowanie.
Przerwanie to mechanizm pozwalający mikroprocesorowi tymczasowo przerwać wykonywanie bieżącego programu w reakcji na zewnętrzne lub wewnętrzne sygnały. Przerwanie informuje procesor o zdarzeniu, które wymaga natychmiastowego obsłużenia i spowoduje przejście do specjalnego kodu obsługi.
Galeria obrazów
2 Obrazy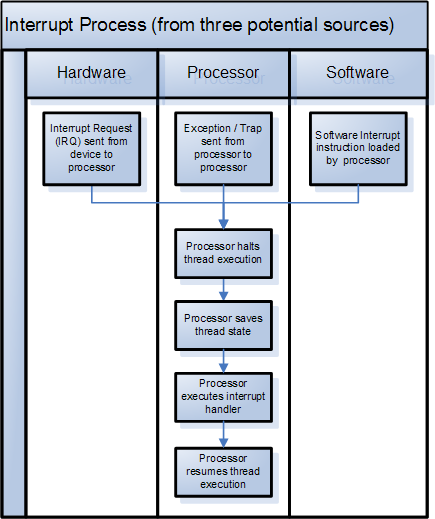

Podstawowe pojęcia
- Sygnał przerwania — informacja wysyłana do procesora (np. elektronika urządzenia) o potrzebie obsługi; na poziomie sprzętowym to zwykle impuls lub komunikat (zobacz sygnał).
- Kod obsługi przerwania (ISR) — procedura wykonywana po przyjęciu przerwania, której zadaniem jest zdiagnozowanie i usunięcie przyczyny oraz przywrócenie stanu programu.
- Wejście/wyjście przerwań — przerwania mogą pochodzić od urządzeń zewnętrznych (sprzętu) lub być generowane przez system i aplikacje (oprogramowanie).
Rodzaje przerwań
- Sprzętowe — inicjowane przez urządzenia zewnętrzne, np. sygnał z kontrolera klawiatury lub karty sieciowej.
- Programowe (software) — generowane przez instrukcje w kodzie (np. wywołanie systemowe) lub przez system operacyjny.
- Synchroniczne — związane z aktualną instrukcją (np. wyjątki dzielenia przez zero).
- Asynchroniczne — niezsynchronizowane z wykonywanym kodem, pojawiają się w dowolnym momencie (np. przerwania sprzętowe).
Typowe przyczyny i przykłady
Przerwania pojawiają się w różnych sytuacjach. Do najczęstszych należą:
- Wejście z urządzeń użytkownika, np. naciśnięcie klawisza na klawiaturze.
- Upłynięcie czasu z wbudowanego zegara lub timera (timer), wykorzystywane np. do wywołań okresowych.
- Transfer danych realizowany przez kontroler DMA (koniec transferu lub błąd).
- Inne zewnętrzne zdarzenia wymagające natychmiastowego działania procesora.
- Sytuacje w programie wskazujące na błąd lub specyficzny stan — przerwanie może nastąpić niezależnie od miejsca w kodzie źródłowym programu.
Jak działa obsługa przerwania
- Procesor odbiera sygnał przerwania i sprawdza, czy przerwania są aktualnie dopuszczone.
- Jeśli przerwania są obsługiwane, procesor zapisuje kontekst (rejestry, licznik programu), aby móc wznowić pracę.
- Wykonywany jest kod obsługi przerwania (ISR), który rozwiązuje przyczynę lub przekazuje zadanie systemowi.
- Po zakończeniu ISR przywracany jest zapisany kontekst i następuje powrót do przerwanego programu.
Mechanizmy organizacyjne
- Priorytety — przerwaniom można przypisywać różne ważności, aby ważniejsze zdarzenia mogły przerwać obsługę mniej istotnych.
- Maska przerwań — możliwość blokowania (wyłączania) wybranych przerwań na czas krytycznych sekcji kodu.
- Wejście do tablicy wektorów — wiele systemów korzysta z tablic adresów ISR, tzw. wektorów przerwań, by wskazać właściwy handler.
Zalety i ograniczenia
- Zalety:
- Efektywne reagowanie na zdarzenia w czasie rzeczywistym.
- Oszczędność zasobów — brak konieczności ciągłego sprawdzania stanu urządzeń (polling).
- Ograniczenia:
- Opóźnienie (latency) — czas od wystąpienia zdarzenia do rozpoczęcia jego obsługi może być krytyczny w systemach czasu rzeczywistego.
- Złożoność programowania — kontekstowe zapisy/odczyty i współbieżność mogą prowadzić do błędów, np. wyścigów.
- Możliwość zjawiska priorytetowego blokowania (priority inversion).
Przerwania vs. polling
- Polling polega na cyklicznym sprawdzaniu stanu urządzeń przez program — proste, ale nieefektywne przy rzadkich zdarzeniach.
- Przerwania są bardziej responsywne i oszczędne zasobowo, ale wymagają dodatkowej warstwy obsługi i synchronizacji.
Praktyczne zastosowania
- Sterowanie wejściami użytkownika (np. klawiatura), gdzie istnieje potrzeba natychmiastowej reakcji.
- Zegar systemowy i okresowe zadania realizowane przez timery.
- Obsługa transferów danych (np. DMA) oraz sygnalizacja zakończenia operacji przez urządzenia.
- Reagowanie na zewnętrzne zdarzenia krytyczne dla aplikacji lub systemu.
Mechanizm przerwań jest fundamentem współczesnych systemów operacyjnych i układów embedded — umożliwia efektywną obsługę wielu niezależnych źródeł zdarzeń bez ciągłego zajmowania procesora i bez konieczności, aby cały program był świadomy szczegółów działania sprzętu.

Jak działają przerwania
Sprzętowe lub programowe wywołanie przerwania (znane jako żądanie przerwania, lub IRQ) jest obsługiwane przez "obsługę przerwania" lub "procedurę obsługi przerwania" (ISR) w procesorze. Umieszcza on to, co robi w danym momencie na stosie, a następnie wykonuje pewne instrukcje, które wykonują dane zadanie w imieniu systemu, co nie musi być częścią programu, który wykonuje. Po zakończeniu wykonywania instrukcji, ISR odbiera to, co umieścił na stosie i kontynuuje to, co robił przed wystąpieniem przerwania.
Wiele kontrolerów przerwań z dzisiejszych procesorów używa wektora przerwań do sortowania przerwań w oparciu o to, skąd pochodzą, między innymi. Wektor zazwyczaj zawiera kod, który musi zostać uruchomiony w momencie wystąpienia przerwania. ISRs są zazwyczaj odpowiedzialne za obsługę przerwania, a także za utrzymywanie się w stanie gotowości do pracy.
Zastosowania przerwań
- Wyzwalanie zadań w regularnych odstępach czasu
- Serwisowanie urządzenia zewnętrznego, które może nastąpić w każdej chwili
- Usuń potrzebę synchronicznego pollingu
- Wyzwalanie systemu operacyjnego (OS) do podjęcia działania
Pytania i odpowiedzi
P: Co to jest przerwanie?
O: Przerwanie to działanie podejmowane przez mikroprocesor, które nie jest częścią wykonywanego programu z powodu zdarzeń zewnętrznych.
P: Co najczęściej powoduje przerwania w procesorze?
O: Przerwania występują najczęściej w procesorze z powodu odbierania sygnałów ze sprzętu.
P: Czy przerwania mogą być powodowane przez oprogramowanie?
O: Tak, przerwania mogą być również powodowane przez oprogramowanie działające równolegle do wykonywanego programu.
P: Proszę wymienić kilka przykładów zdarzeń, które mogą spowodować przerwanie.
O: Przykłady zdarzeń, które mogą wywołać przerwanie to naciśnięcie klawisza na klawiaturze, wyłączenie timera i transfer danych.
P: Czy przerwanie jest zależne od miejsca wykonywania programu?
O: Nie, przerwania mogą wystąpić w dowolnym momencie wykonywania programu, niezależnie od tego, gdzie program znajduje się w kodzie źródłowym.
P: Czy przerwanie jest pożądanym zdarzeniem dla mikroprocesora?
O: Przerwania są zazwyczaj niepożądanymi zdarzeniami dla mikroprocesora, ponieważ zakłócają wykonywanie programu i wymagają natychmiastowej uwagi.
P: W jaki sposób mikroprocesor reaguje na przerwanie?
O: Mikroprocesor tymczasowo zawiesza wykonywany program i wykonuje procedurę obsługi przerwania (ISR), aby obsłużyć przerwanie przed powrotem do wykonywanego programu.
Powiązane artykuły
Autor
AlegsaOnline.com Przerwania w systemach komputerowych: mechanizm obsługi zdarzeń sprzętowych i programowych Leandro Alegsa
URL: https://pl.alegsaonline.com/art/47746
Źródła
- embedded.com : "Introduction to interrupts"